|
|
|
|
Seislet transform and seislet frame |
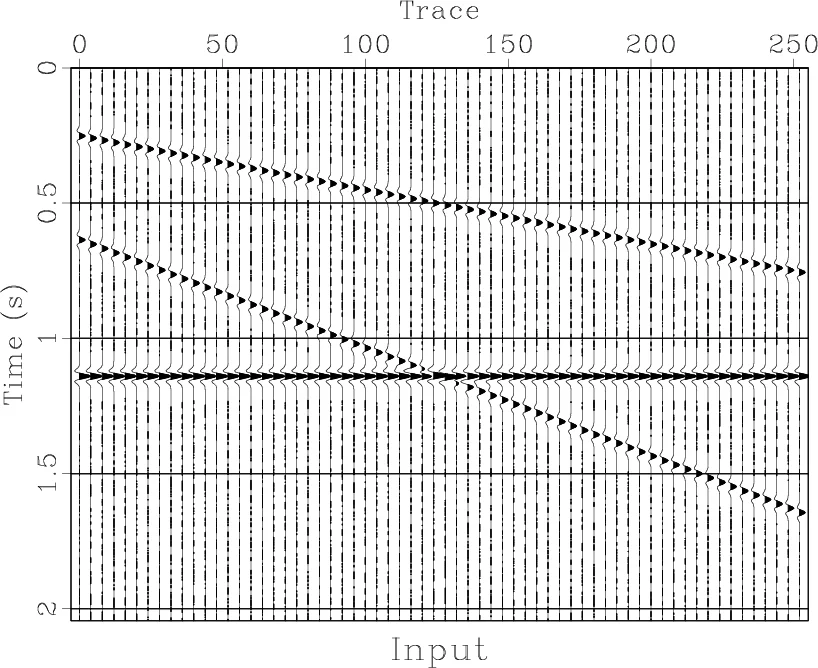
To analyze 2-D data, one can apply 1-D seislet frame in the distance
direction after the Fourier transform in time (the ![]() -
-![]() domain). In this case, different frame frequencies correspond to
different plane-wave slopes (Canales, 1984). We use a simple
plane-wave synthetic model to verify this observation
(Figure 15a). The
domain). In this case, different frame frequencies correspond to
different plane-wave slopes (Canales, 1984). We use a simple
plane-wave synthetic model to verify this observation
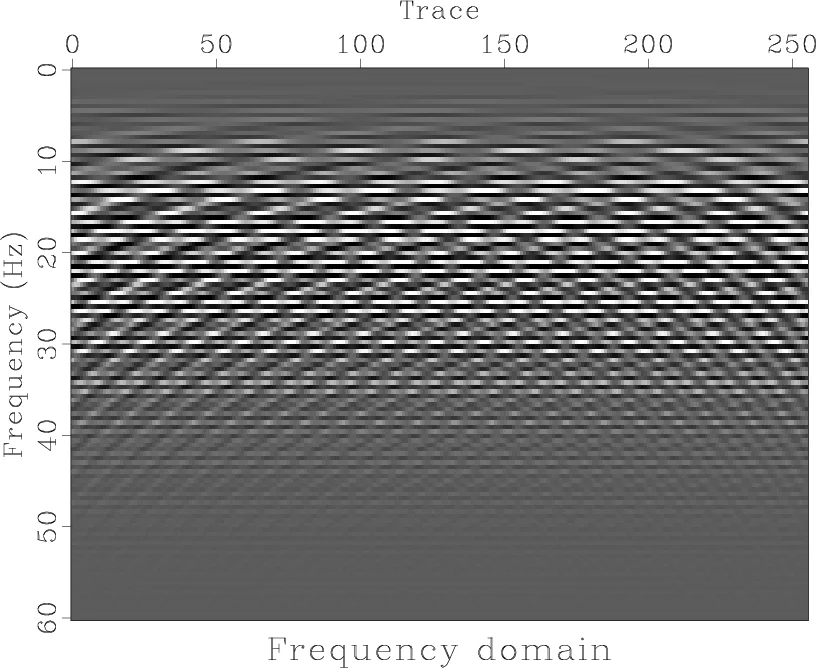
(Figure 15a). The ![]() -
-![]() plane is shown in
Figure 15b. We find a prediction-error-filter (PEF) in each
frequency slice and detect its roots to select appropriate spatial
frequencies. We use Burg's algorithm for PEF estimation
(Claerbout, 1976; Burg, 1975) and an eigenvalue-based algorithm for
root finding (Edelman and Murakami, 1995). The seislet coefficients and the
corresponding recovered plane-wave components are shown in
Figure 16. Similarly to the 1-D example,
information from different plane-waves gets strongly compressed
in the transform domain.
plane is shown in
Figure 15b. We find a prediction-error-filter (PEF) in each
frequency slice and detect its roots to select appropriate spatial
frequencies. We use Burg's algorithm for PEF estimation
(Claerbout, 1976; Burg, 1975) and an eigenvalue-based algorithm for
root finding (Edelman and Murakami, 1995). The seislet coefficients and the
corresponding recovered plane-wave components are shown in
Figure 16. Similarly to the 1-D example,
information from different plane-waves gets strongly compressed
in the transform domain.
|
|---|
|
plane,fft
Figure 15. Synthetic plane-wave data (a) and corresponding Fourier transform along the time direction (b). |
|
|



|
|---|
|
plane1,plane2,plane3
Figure 16. Seislet coefficients (left) and corresponding recovered plane-wave components (right) for three different parts of the 1-D seislet frame in the |
|
|
|
|
|
|
Seislet transform and seislet frame |