|
|
|
|
Homework 3 |
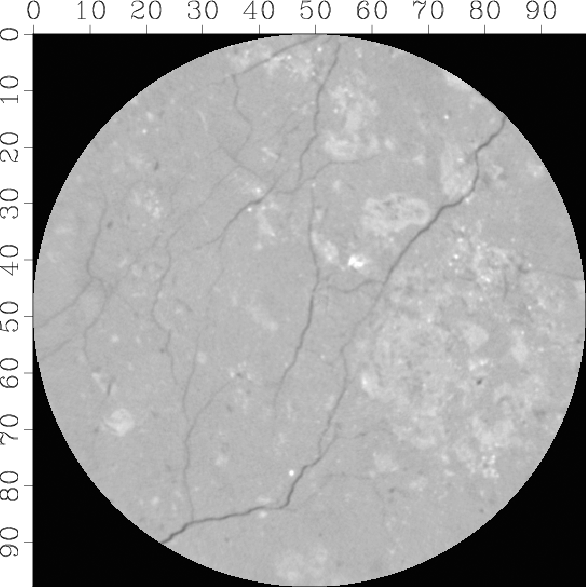
In this exercise, we will use a slice out of a 3-D CT-scan of a
carbonate rock sample, shown in
Figure 1a![]() . Notice microfracture channels.
. Notice microfracture channels.
|
|---|
|
circle,rotate
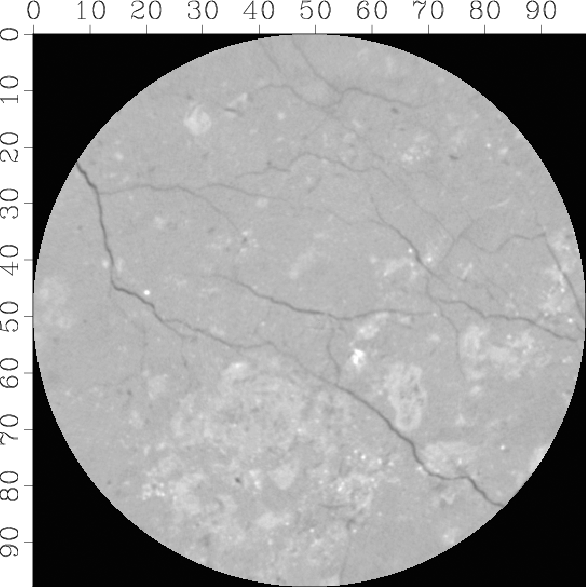
Figure 1. Slice of a CT-scan of a carbonate rock sample. (a) Original. (b) After clockwise rotation by |
|
|
The goal of the exercise is to apply a coordinate transformation to the original data. A particular transformation that we will study is coordinate rotation. Figure 1b shows the original slice rotated by 90 degrees. A 90-degree rotation in this case amounts to simple transpose. However, rotation by a different angle requires interpolation from the original grid to the modified grid.
The task of coordinate rotation is accomplished by the C program rotate.c (alternatively, Python script rotate.py.) Two different methods are implemented: nearest-neighbor interpolation and bilinear interpolation.
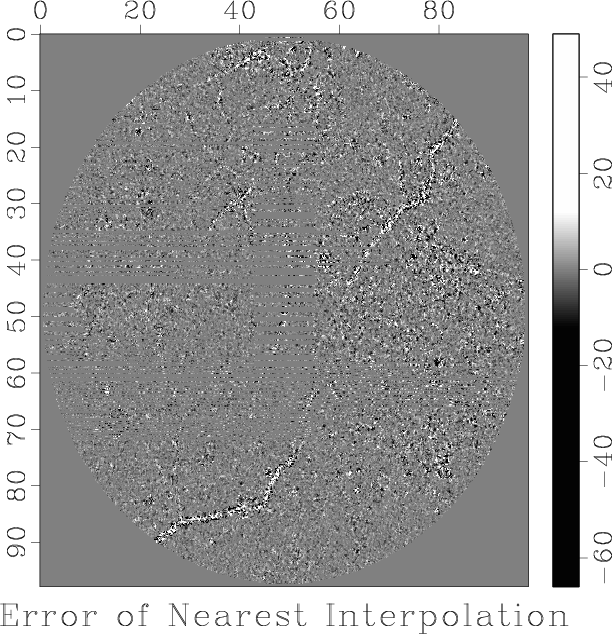
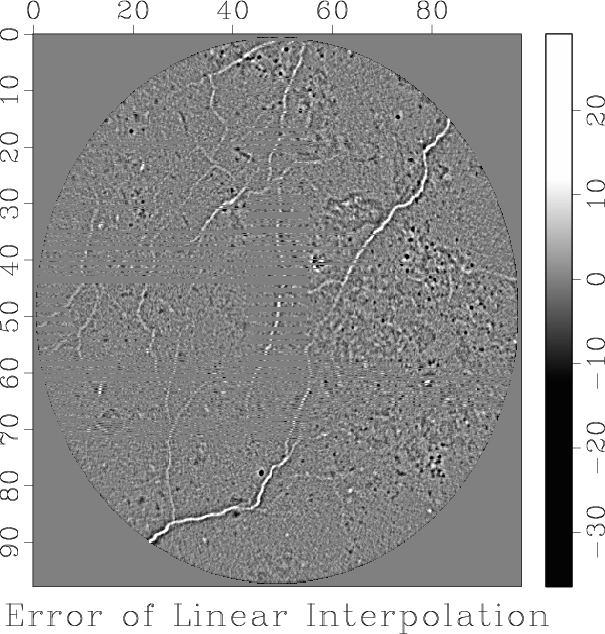
To test the accuracy of different methods, we can rotate the original
data in small increments and then compare the result of rotating to
![]() with the original data. Figure 2
compares the error of the nearest-neighbor and bilinear interpolations
after rotating the original slice in increments of
with the original data. Figure 2
compares the error of the nearest-neighbor and bilinear interpolations
after rotating the original slice in increments of ![]() . The
accuracy is comparatively low for small discontinuous features like
microfracture channels.
. The
accuracy is comparatively low for small discontinuous features like
microfracture channels.
To improve the accuracy further, we need to employ a longer
filter. One popular choice is cubic convolution interpolation,
invented by Robert Keys (a geophysicist, currently at ConocoPhillips).
The cubic convolution filter can be expressed as the
filter (Keys, 1981)
|
|---|
|
nearest,linear
Figure 2. Error of different interpolation methods computed after full circle rotation in increments of 20 degrees. (a) Nearest-neighbor interpolation. (b) Bi-linear interpolation. |
|
|
/* Rotate around. */
#include <rsf.h>
int main(int argc, char* argv[])
{
int n1, n2, i1, i2, k1, k2;
float x1, x2, c1, c2, cosa, sina, angle;
float **orig, **rotd;
char *interp;
sf_file inp, out;
/* initialize */
sf_init(argc,argv);
inp = sf_input("in");
out = sf_output("out");
/* get dimensions from input */
if (!sf_histint(inp,"n1",&n1)) sf_error("No n1= in inp");
if (!sf_histint(inp,"n2",&n2)) sf_error("No n2= in inp");
/* get parameters from command line */
if (!sf_getfloat("angle",&angle)) angle=90.;
/* rotation angle */
if (NULL == (interp = sf_getstring("interp")))
interp="nearest";
/* [n,l,c] interpolation type */
/* convert degrees to radians */
angle *= SF_PI/180.;
cosa = cosf(angle);
sina = sinf(angle);
orig = sf_floatalloc2(n1,n2);
rotd = sf_floatalloc2(n1,n2);
/* read data */
sf_floatread(orig[0],n1*n2,inp);
/* central point */
c1 = (n1-1)*0.5;
c2 = (n2-1)*0.5;
for (i2=0; i2 < n2; i2++) {
for (i1=0; i1 < n1; i1++) {
/* rotated coordinates */
x1 = c1+(i1-c1)*cosa-(i2-c2)*sina;
x2 = c2+(i1-c1)*sina+(i2-c2)*cosa;
/* nearest neighbor */
k1 = floorf(x1); x1 -= k1;
k2 = floorf(x2); x2 -= k2;
switch(interp[0]) {
case 'n': /* nearest neighbor */
if (x1 > 0.5) k1++;
if (x2 > 0.5) k2++;
if (k1 >=0 && k1 < n1 &&
k2 >=0 && k2 < n2) {
rotd[i2][i1] = orig[k2][k1];
} else {
rotd[i2][i1] = 0.;
}
break;
case 'l': /* bilinear */
if (k1 >=0 && k1 < n1-1 &&
k2 >=0 && k2 < n2-1) {
rotd[i2][i1] =
(1.-x1)*(1.-x2)*orig[k2][k1] +
x1 *(1.-x2)*orig[k2][k1+1] +
(1.-x1)*x2 *orig[k2+1][k1] +
x1 *x2 *orig[k2+1][k1+1];
} else {
rotd[i2][i1] = 0.;
}
break;
case 'c': /* cubic convolution */
/* !!! ADD CODE !!! */
break;
default:
sf_error("Unknown method %s",interp);
break;
}
}
}
/* write result */
sf_floatwrite(rotd[0],n1*n2,out);
exit(0);
}
|
#!/usr/bin/env python
import sys
import math
import numpy as np
import m8r
# initialize
par = m8r.Par()
inp = m8r.Input()
out = m8r.Output()
# get dimensions from input
n1 = inp.int('n1')
n2 = inp.int('n2')
# get parameters from command line
angle = par.float('angle',90.)
# rotation angle
interp = par.string('interp','nearest')
# [n,l,c] interpolation type
# convert degrees to radians
angle = angle*math.pi/180.
cosa = math.cos(angle)
sina = math.sin(angle)
orig = np.zeros([n1,n2],'f')
rotd = np.zeros([n1,n2],'f')
# read data
inp.read(orig)
# central point
c1 = (n1-1)*0.5
c2 = (n2-1)*0.5
for i2 in range(n2):
for i1 in range(n1):
# rotated coordinates
x1 = c1+(i1-c1)*cosa-(i2-c2)*sina
x2 = c2+(i1-c1)*sina+(i2-c2)*cosa
# nearest neighbor
k1 = int(math.floor(x1))
k2 = int(math.floor(x2))
x1 -= k1
x2 -= k2
if interp[0] == 'n':
# nearest neighbor
if x1 > 0.5:
k1 += 1
if x2 > 0.5:
k2 += 1
if k1 >=0 and k1 < n1 and k2 >=0 and k2 < n2:
rotd[i2,i1] = orig[k2,k1]
else:
rotd[i2,i1] = 0.
elif interp[0] == 'l':
# bilinear
if k1 >=0 and k1 < n1-1 and k2 >=0 and k2 < n2-1:
rotd[i2,i1] = (1.-x1)*(1.-x2)*orig[k2,k1] + x1 *(1.-x2)*orig[k2,k1+1] + (1.-x1)*x2 *orig[k2+1,k1] + x1 *x2 *orig[k2+1,k1+1]
else:
rotd[i2,i1] = 0.
elif interp[0] == 'c':
# cubic convolution
# !!! ADD CODE !!!
break
else:
sys.stderr.write('Unknown method "%s"' % interp)
sys.exit(1)
# write result */
out.write(rotd)
sys.exit(0)
|
from rsf.proj import *
# Download data
Fetch('slice.rsf','ctscan')
Flow('circle','slice','dd type=float')
grey = 'grey wanttitle=n screenratio=1 bias=128 clip=105'
Result('circle',grey)
# Rotate program
# exe = Program('rotate.c')
# UNCOMMENT ABOVE AND COMMENT BELOW IF YOU WANT TO USE C
exe = Command('rotate.exe','rotate.py','cp $SOURCE $TARGET')
AddPostAction(exe,Chmod(exe,0o755))
rotate = str(exe[0])
# Rotate by 90 degrees
Flow('rotate',['circle',rotate],
'./${SOURCES[1]} angle=90 interp=nearest')
Result('rotate',grey)
# Mask for the circle
Flow('mask','circle',
'''
put d1=1 o1=-255.5 d2=1 o2=-255.5 |
math output="sqrt(x1*x1+x2*x2)" |
mask min=255.5 | dd type=float |
smooth rect1=3 rect2=3 |
mask max=0 | dd type=float |
put d1=0.1914 o1=0 d2=0.1914 o2=0
''')
for case in ('nearest','linear'): # !!! MODIFY ME !!!
new = 'circle'
rotates = []
for r in range(18):
old = new
new = '%s-circle%d' % (case,r)
Flow(new,[old,rotate],
'./${SOURCES[1]} angle=20 interp=%s' % case)
Plot(new,grey)
rotates.append(new)
# Movie of rotating circle
Plot(case,rotates,'Movie',view=1)
# Plot error
Result(case,[new,'circle','mask'],
'''
add scale=1,-1 ${SOURCES[1]} |
add mode=p ${SOURCES[2]} |
%s bias=0 scalebar=y clip=12
wanttitle=y title="Error of %s Interpolation"
''' % (grey,case.capitalize()))
End()
|
Your task:
scons viewto reproduce the figures on your screen.
scons nearest.vpland
scons linear.vplto see movies of incremental slice rotation with different methods.
|
|
|
|
Homework 3 |