|
|
|
|
Deblending using a space-varying median filter |
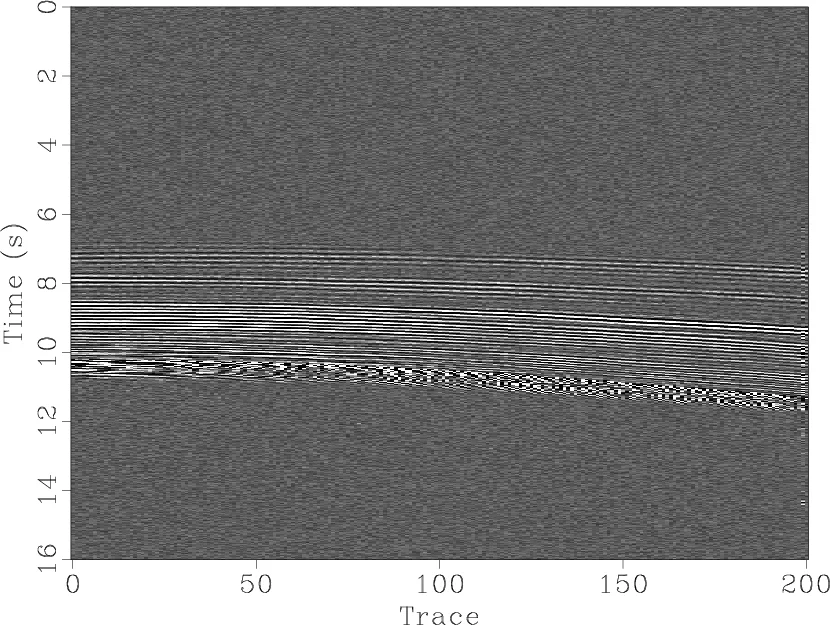
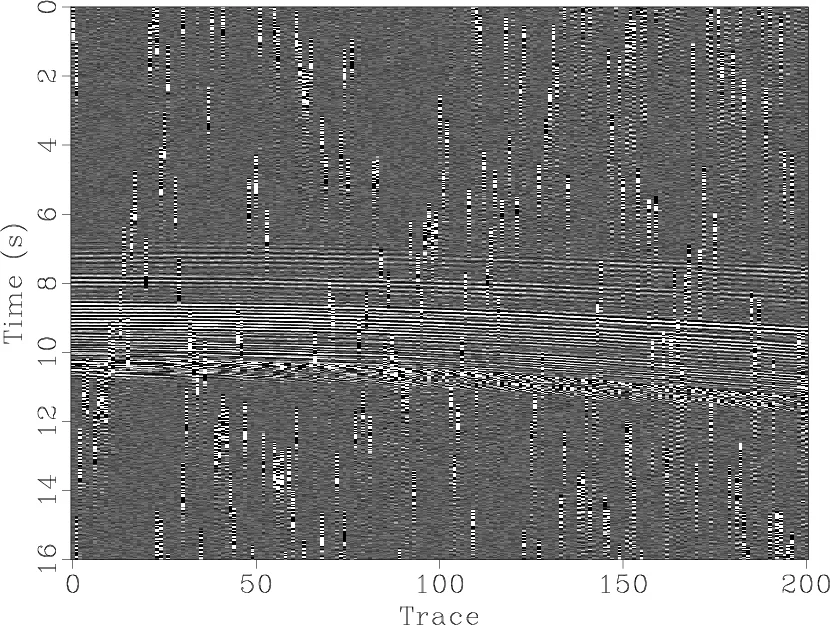
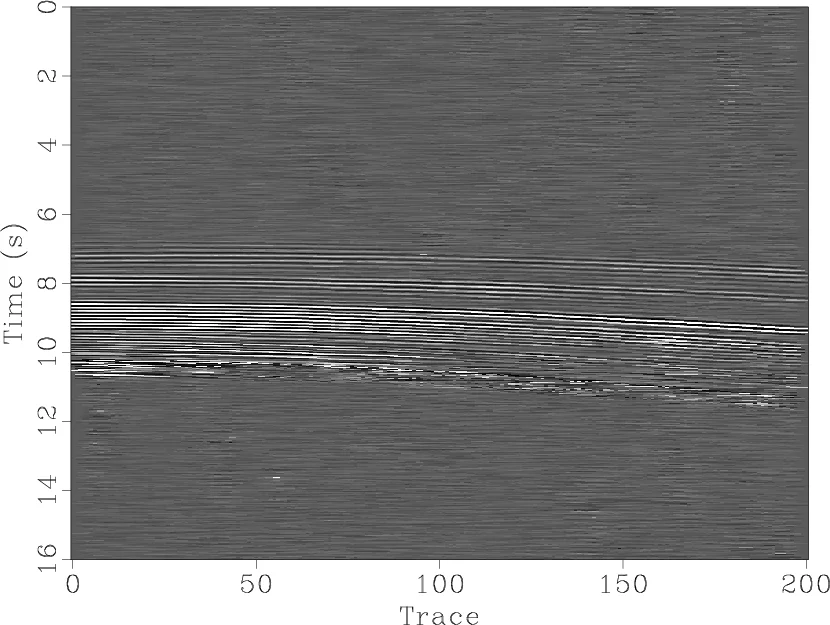
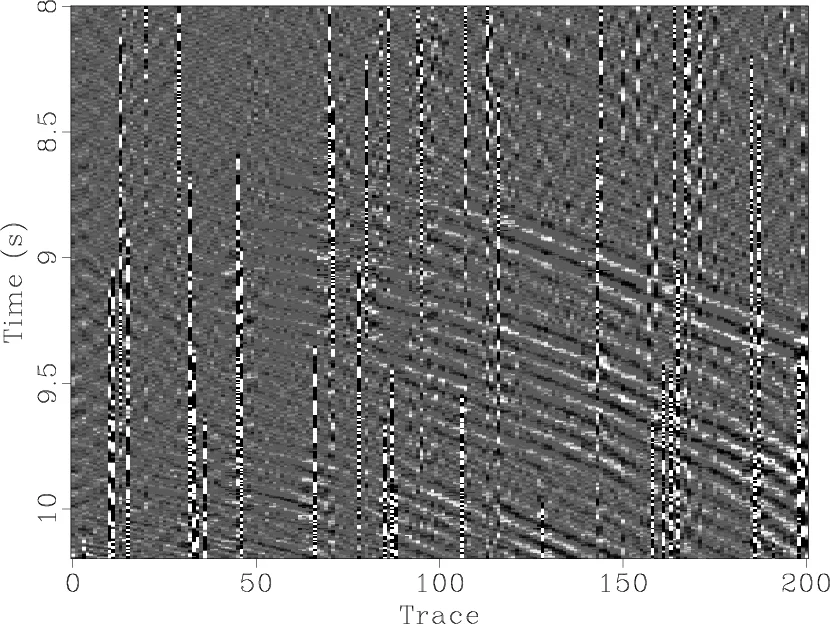
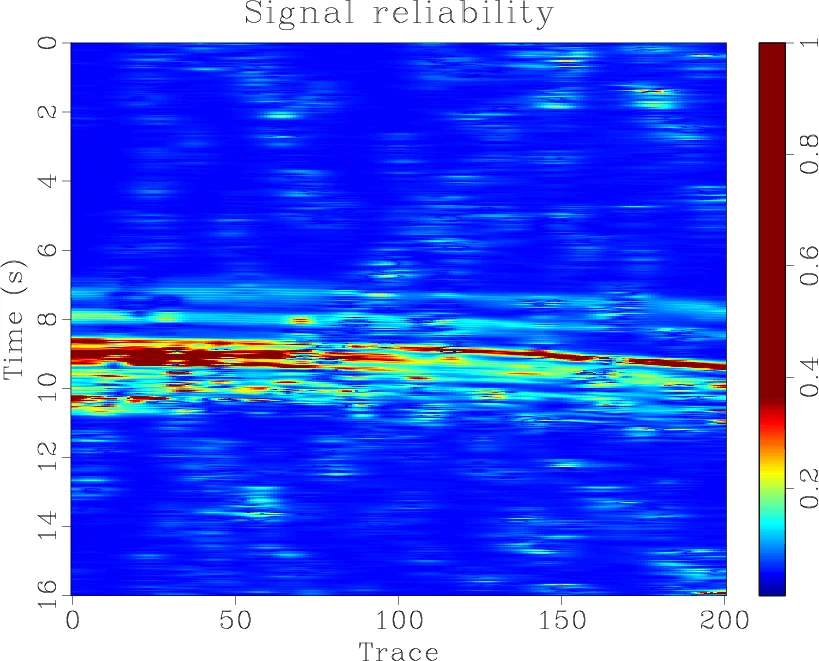
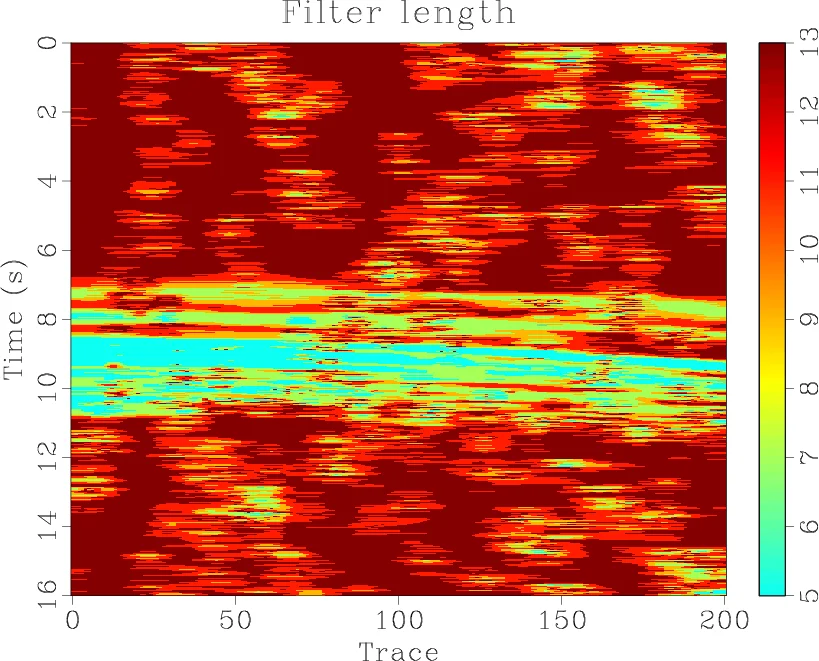
The second example is a marine-field CRG. The temporal sampling is 4 ms. There are 4001 time samples and 201 traces in this CRG. I used the same blending approach as in the first example. The unblended and blended data are shown in Figures 6a and 6b. While both MF and SVMF were able to effectively remove most of the strong spike-like blending noise, SVMF resulted in a much better preservation of the useful signal. The deblending results of MF and SVMF and their corresponding noise sections are shown in Figure 7. For better comparison, two zoomed sections corresponding to the two frame boxes shown in Figure 7 are shown in Figure 8. SVMF clearly causes less loss of useful signal. The initial filter length for this example is set to be 9. The increments/decrements ![]() are chosen as the default values. The maps of SR and variable filter length are shown in Figures 9a and 9b. As indicated by the scalebar of the maps, filter length ranged from 5 points to 11 points.
are chosen as the default values. The maps of SR and variable filter length are shown in Figures 9a and 9b. As indicated by the scalebar of the maps, filter length ranged from 5 points to 11 points.
|
|---|
|
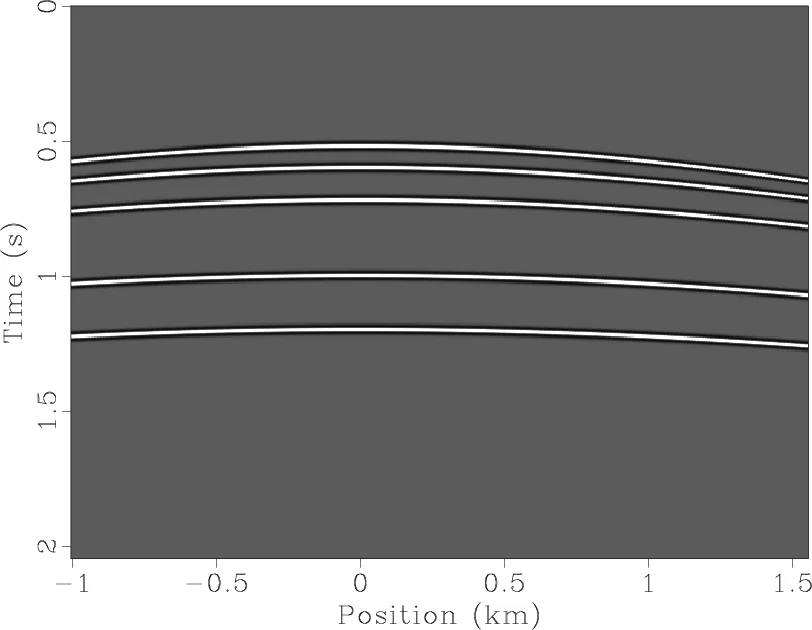
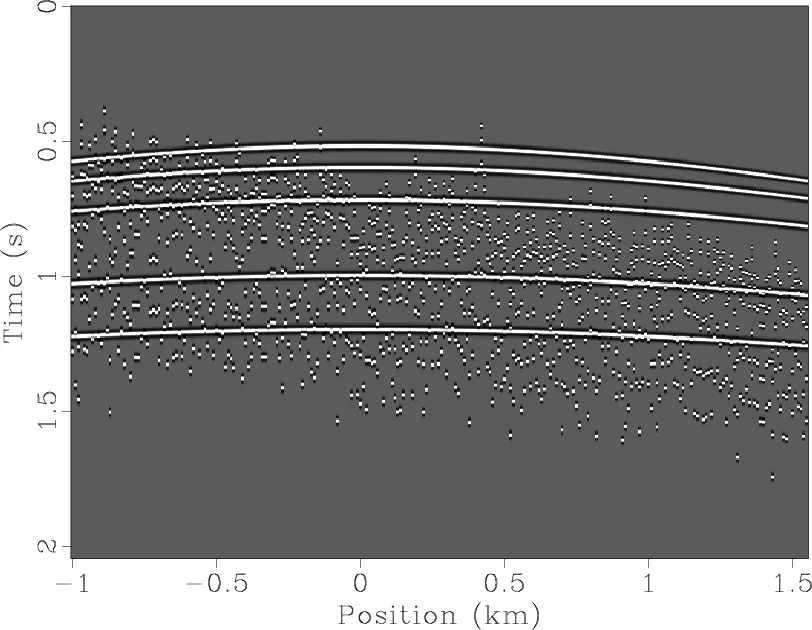
data1,datas
Figure 4. Synthetic data examples. (a) Unblended common-receiver-domain data. (b) Blended data. |
|
|

|
|---|
|
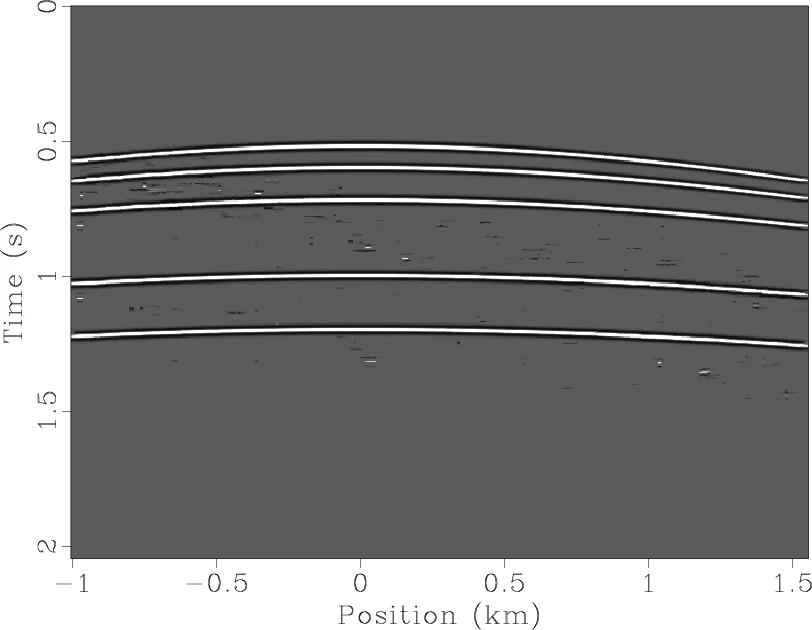
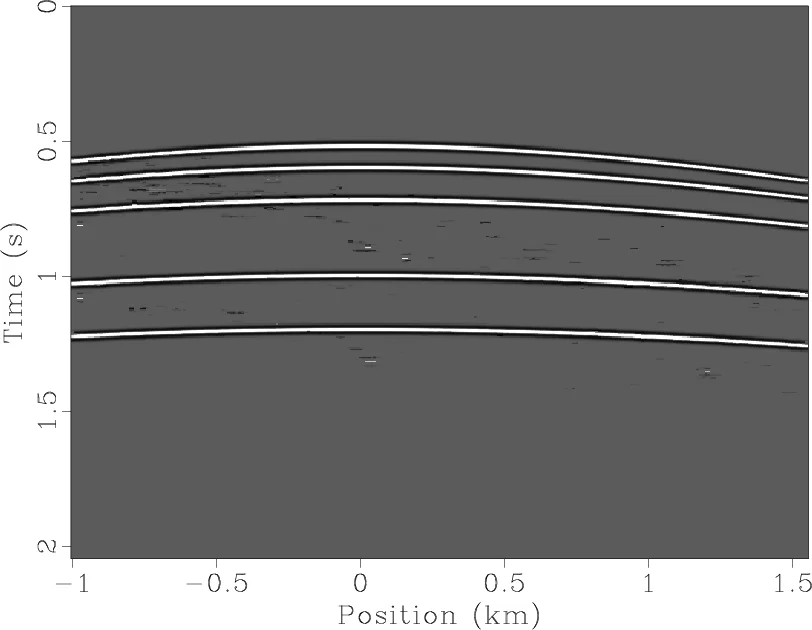
deblended1mf,deblended1svmf,diff1mf,diff1svmf
Figure 5. Demonstration of deblending effects for blended synthetic data. (a)Deblended using MF. (b)Deblended using SVMF. (c)Noise section using MF. (d)Noise section using SVMF. |
|
|
|
|---|
|
fairunblended2,fairblended2
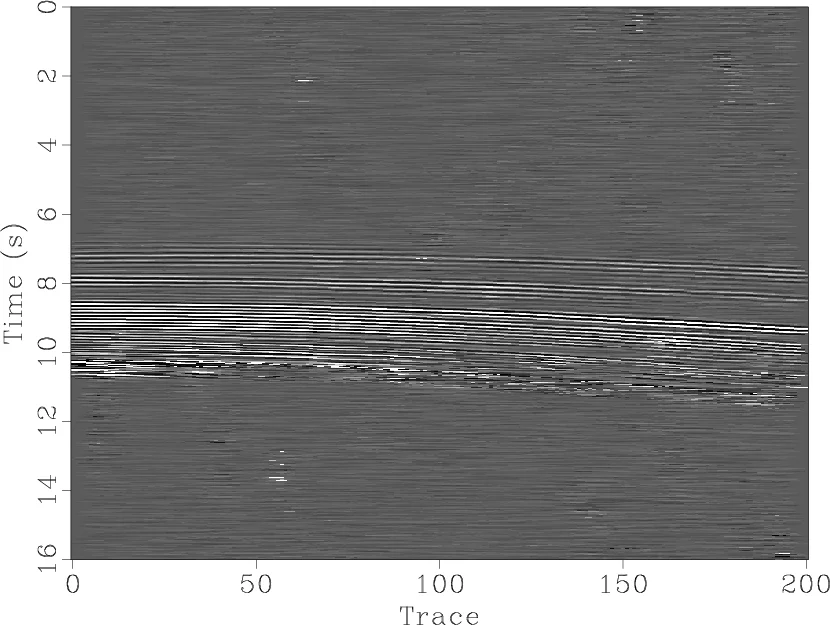
Figure 6. Marine field data examples. (a) Unblended common-receiver-domain data. (b) Blended data. |
|
|
|
|---|
|
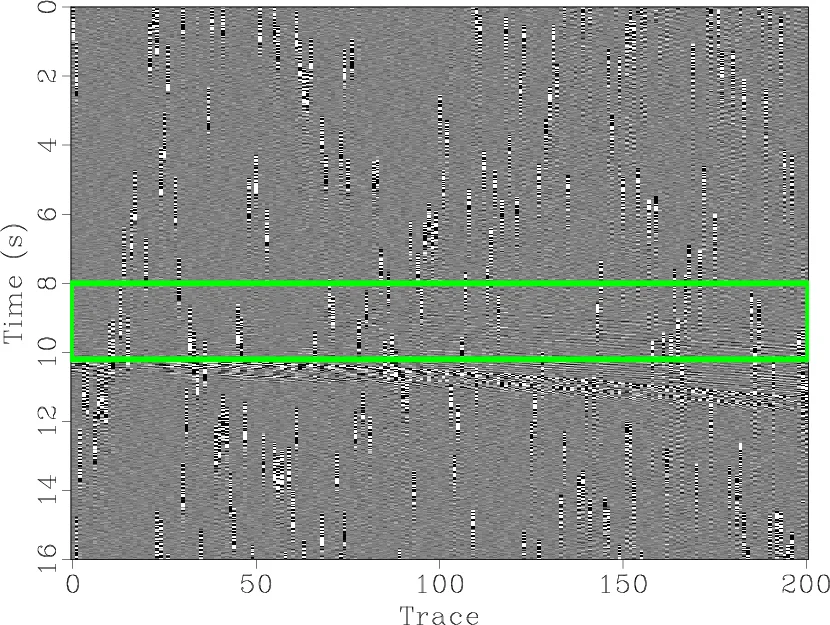
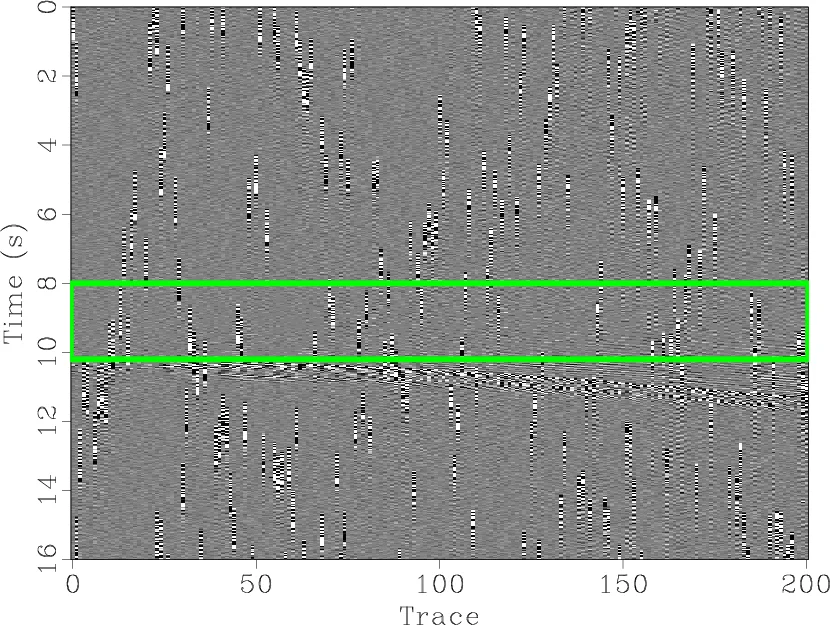
fairdeblended2mf,fairdeblended2svmf,diff2mfframe,diff2svmfframe
Figure 7. Demonstration of deblending effects for blended marine field data. (a) Deblended using MF. (b) Deblended using SVMF. (c) Noise section using MF. (d) Noise section using SVMF. The green frame boxes are zoomed in Figure 8 for better comparison. |
|
|

|
|---|
|
diff2mfzoom,diff2svmfzoom
Figure 8. Zoomed noise sections (corresponding to the two green frame boxes as shown in Figure 7). (a) Zoomed noise section corresponding to MF. (b) Zoomed noise section corresponding to SVMF. |
|
|
|
|---|
|
fairsimi2,fairL2
Figure 9. (a) Map of SR for field data. (b) Map of variable filter length for field data. |
|
|
|
|
|
|
Deblending using a space-varying median filter |